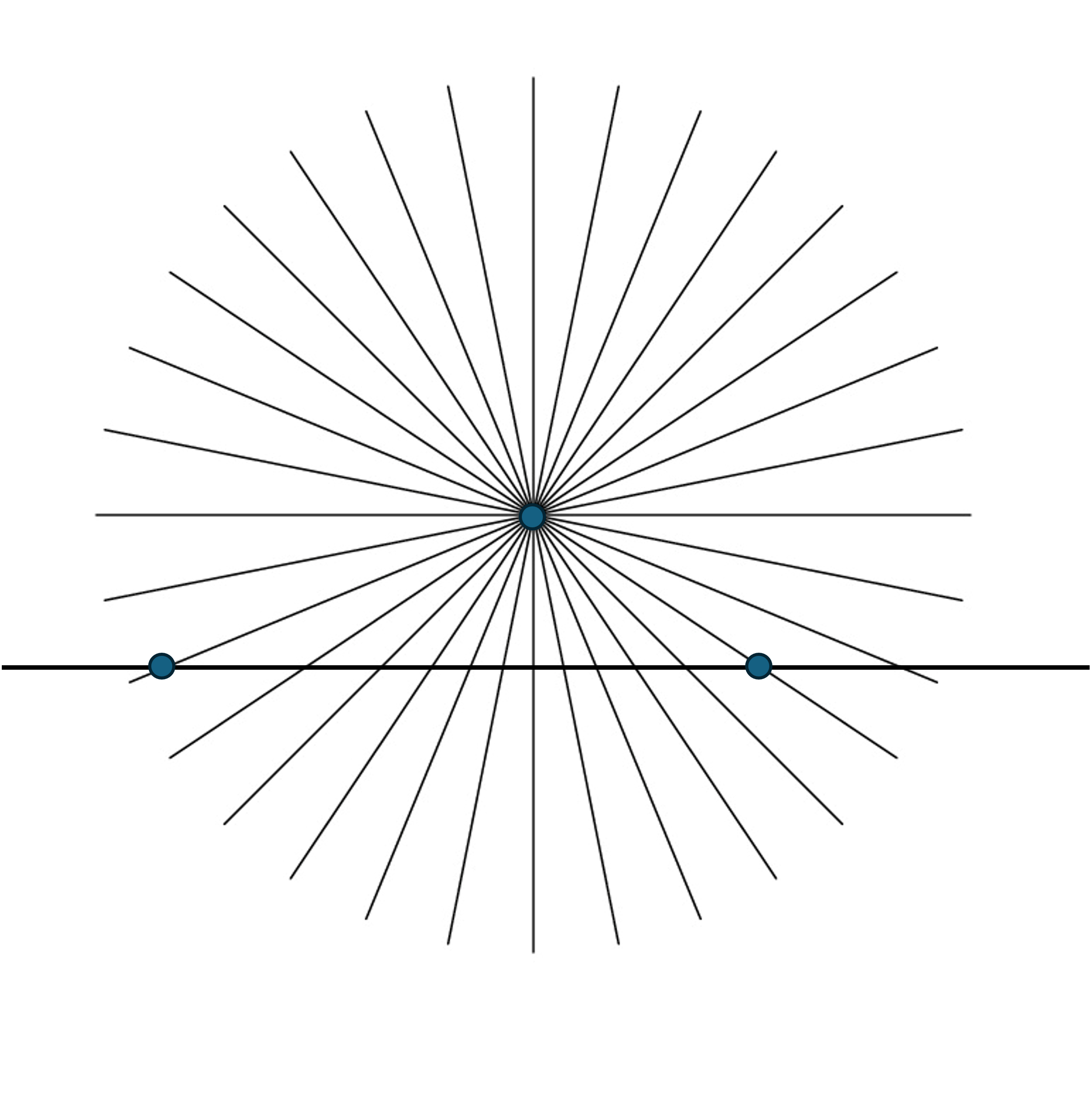
This diagram is here as a reminder to read and understand the previous post.
It is obvious that because the speed of light is constant in every possible reference frame, then it requires distances and times to be different between events relative to the reference frame in which we measure them. So, if distances change from one reference frame to another, then how exactly do we make sense of the concept of distance in Space-Time?
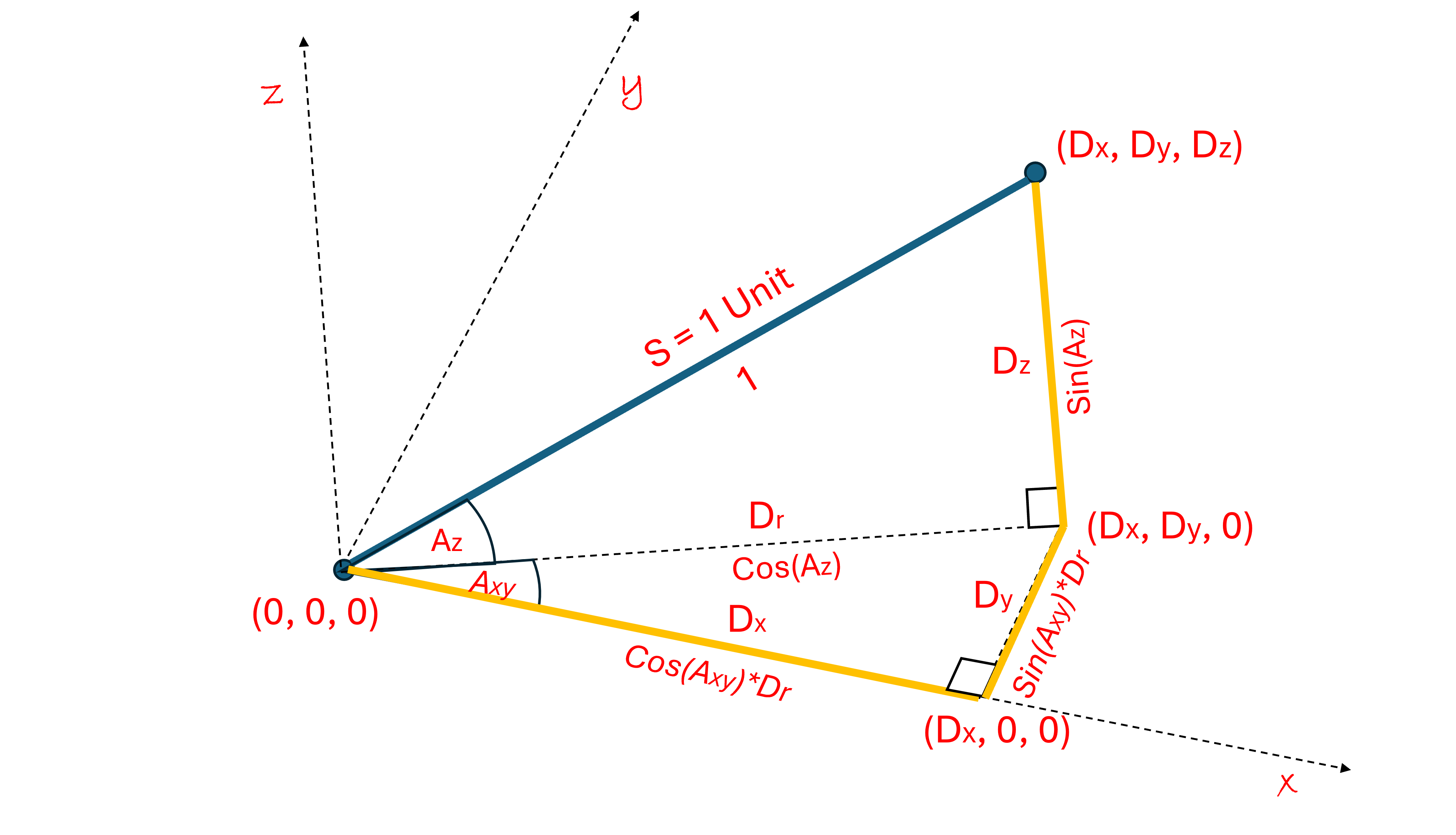
We have seen in 3-D space, when a point (x, y, z) is not moving in time, we simply change our reference frame by “moving our head”. We can set our Nose direction to point directly toward the point (x, y, z), in the direction (Dx, Dy, Dz). Recall that the point:
(x, y, z) = (Dx, Dy, Dz) * S
where S is the distance from our nose (0, 0, 0) to the point (x, y, z). We assume that rotating our head does not change the distance to the point. This is what is called a “spherical metric”.
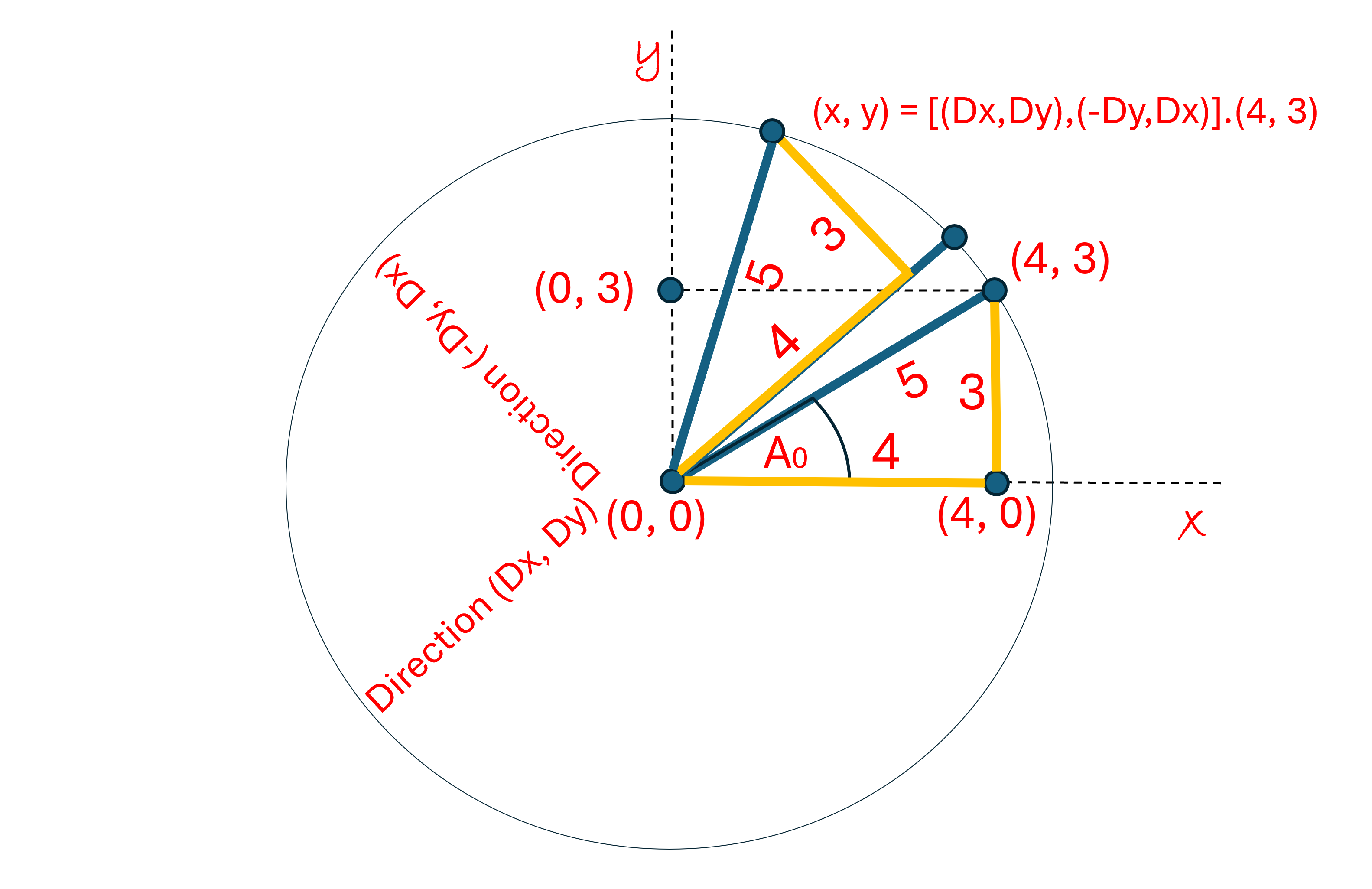
It is easier to picture this in 2-dimensions (when z = 0), so we will use only the ‘x’ and ‘y’ dimensions for our illustration. Recall:
(x, y) = (Dx, Dy) * S
meaning
x = Dx * S
y = Dy * S
Where the (Dx, Dy) direction is shown in the following diagram:
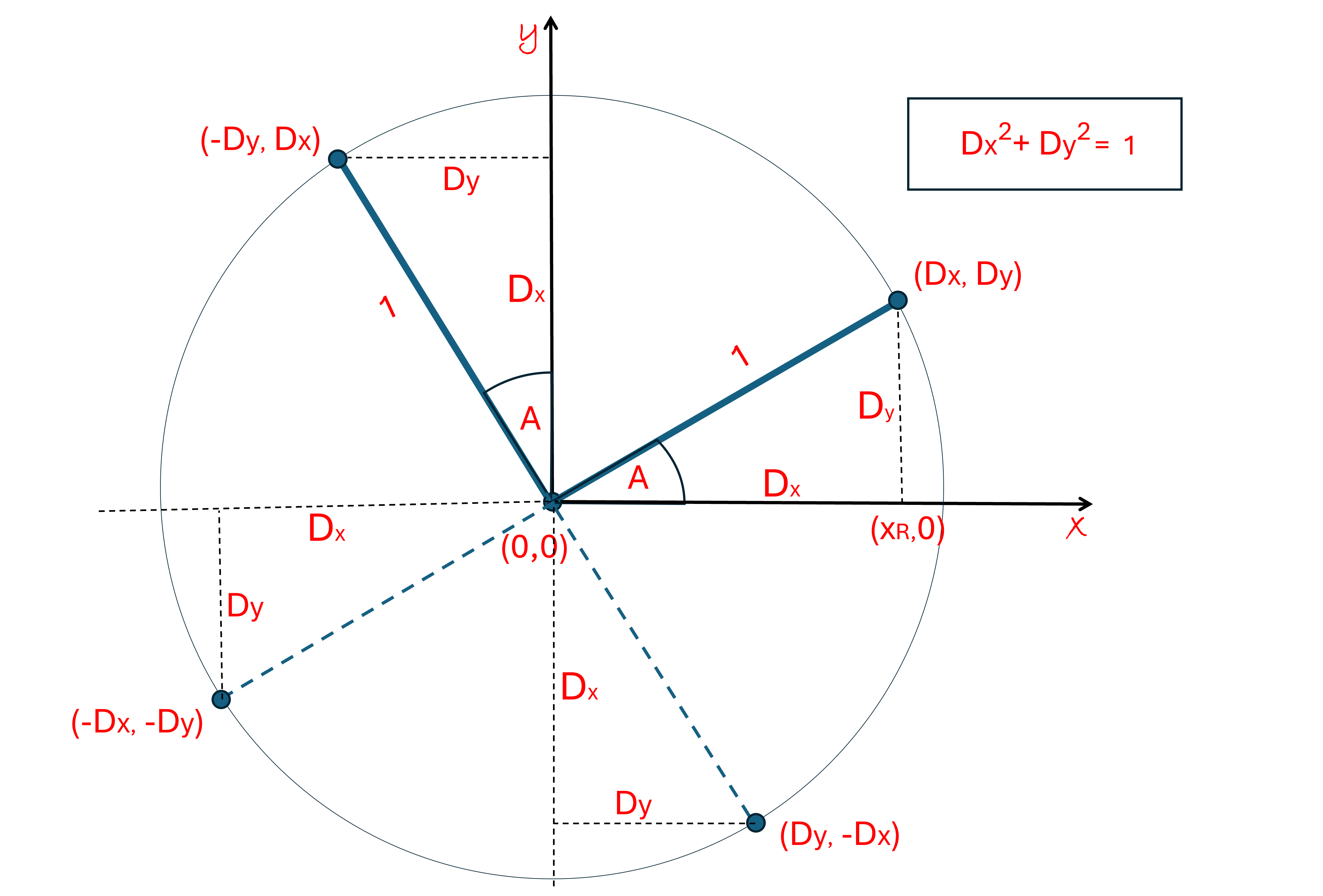
Recall that if we “dot” (x, y) with the direction (Dx, Dy):
(Dx, Dy).(x, y) = (Dx, Dy).(Dx, Dy) * S
= (Dx*Dx + Dy*Dy) * S
= (Dx2 + Dy2) * S
If the metric (Dx2 + Dy2) = 1, then the Distance (S) is just this dot product. We have looked at this in detail before. This is called a “spherical” metric, because distances are the same in all directions, like the radius of a sphere. With this metric, the distance is the same regardless of the orientation (angle) of the reference frame. Nothing new here.
Yet if the point (x, y, z, C*t) in Space-Time is moving, then the situation is different. We cannot set a fixed “Nose direction” to look at a moving point. We first must start moving with the same speed in the same direction as the point. Now in this moving reference frame, the point is stationary, not moving, and then the “Nose Direction” can be set.
In space-time, the speed at which a point is moving is determined by the angle (At) it is off the C*t-axis. Going into another frame of reference means finding the “angle” of a line that will match the point’s speed. The angle At is often called the “boost” parameter and is directly related to the speed of the point traveling along this line. We will look at how to change the speeds (At) of reference frames relative to each other in space-time.
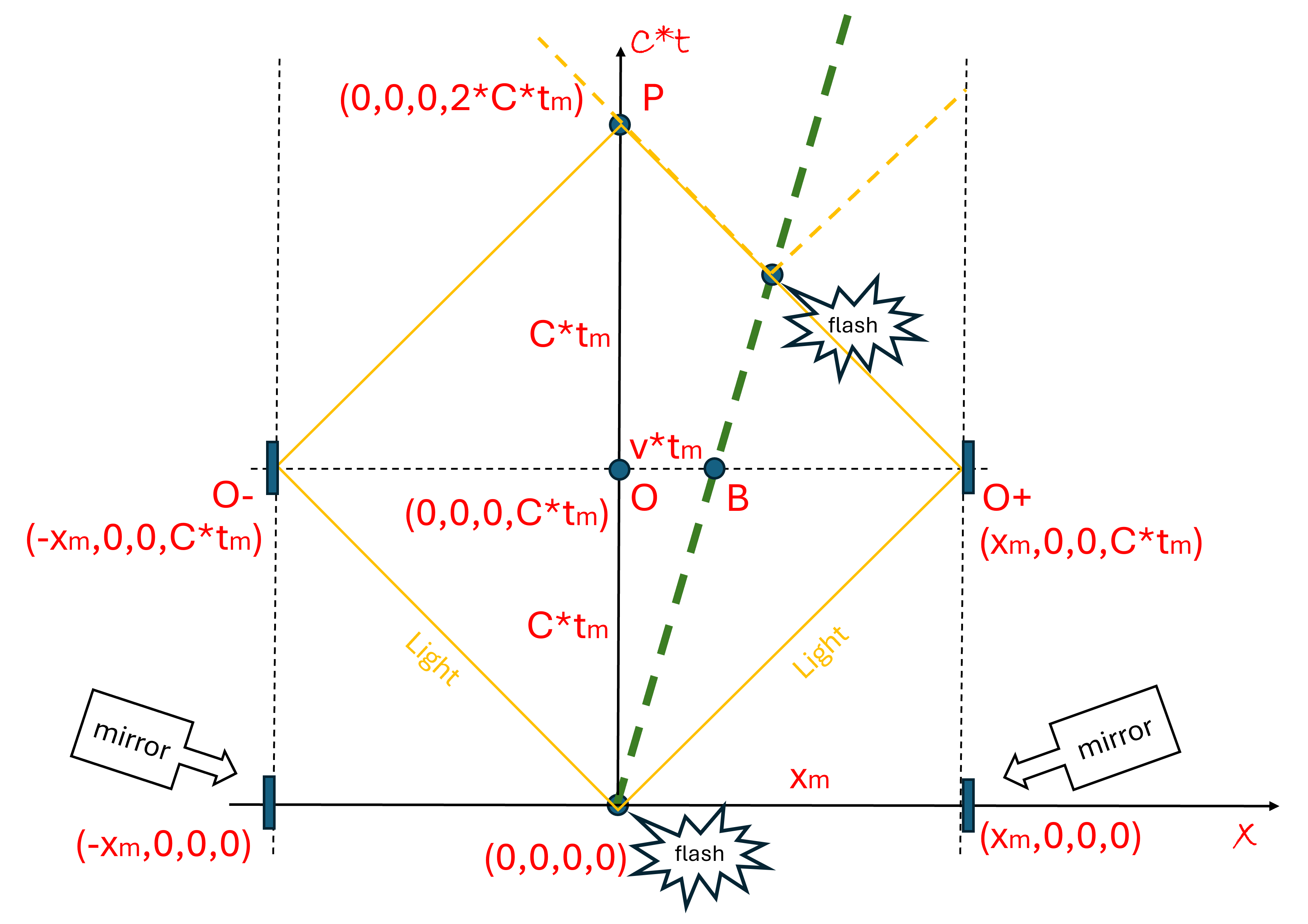
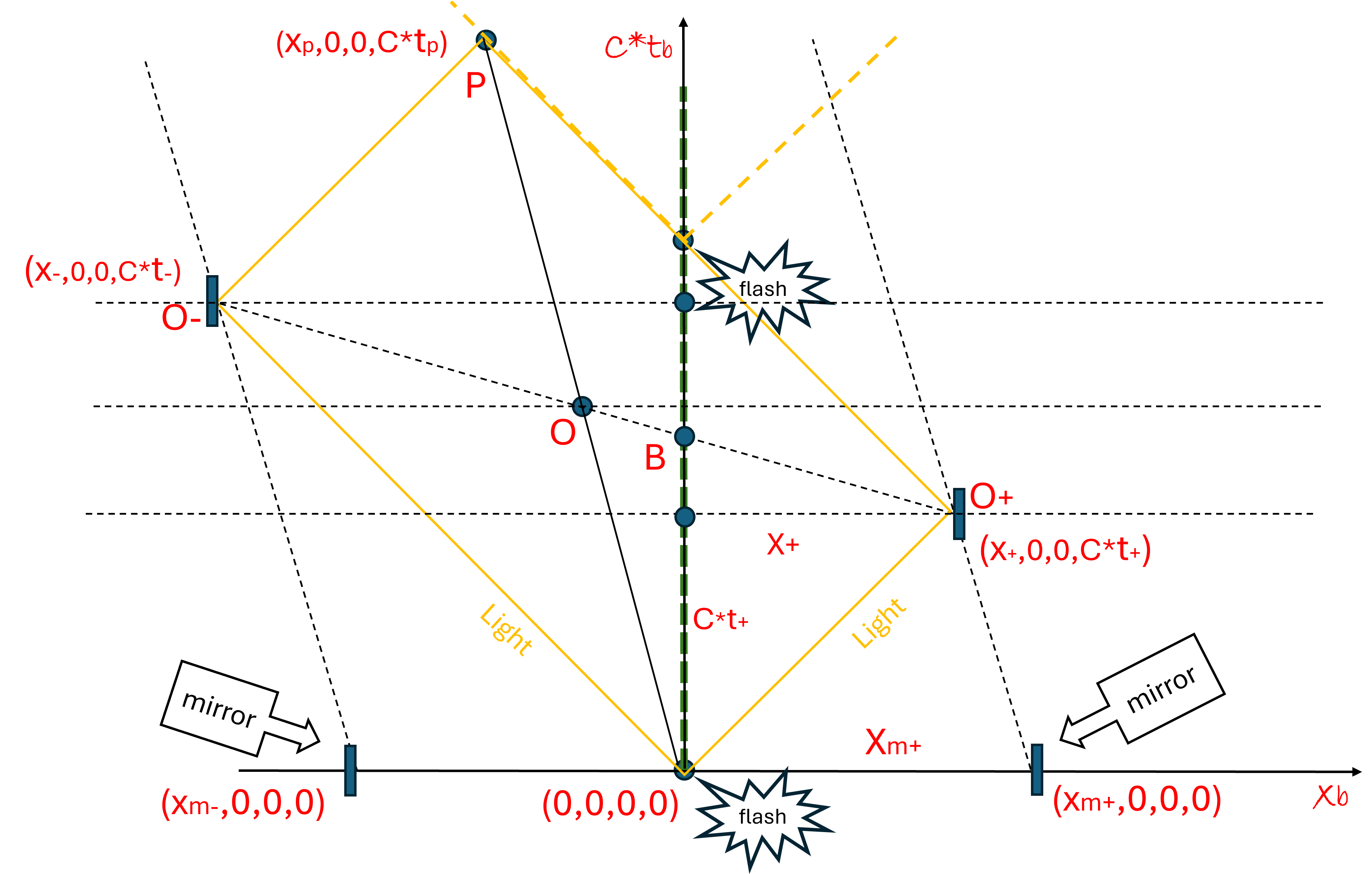
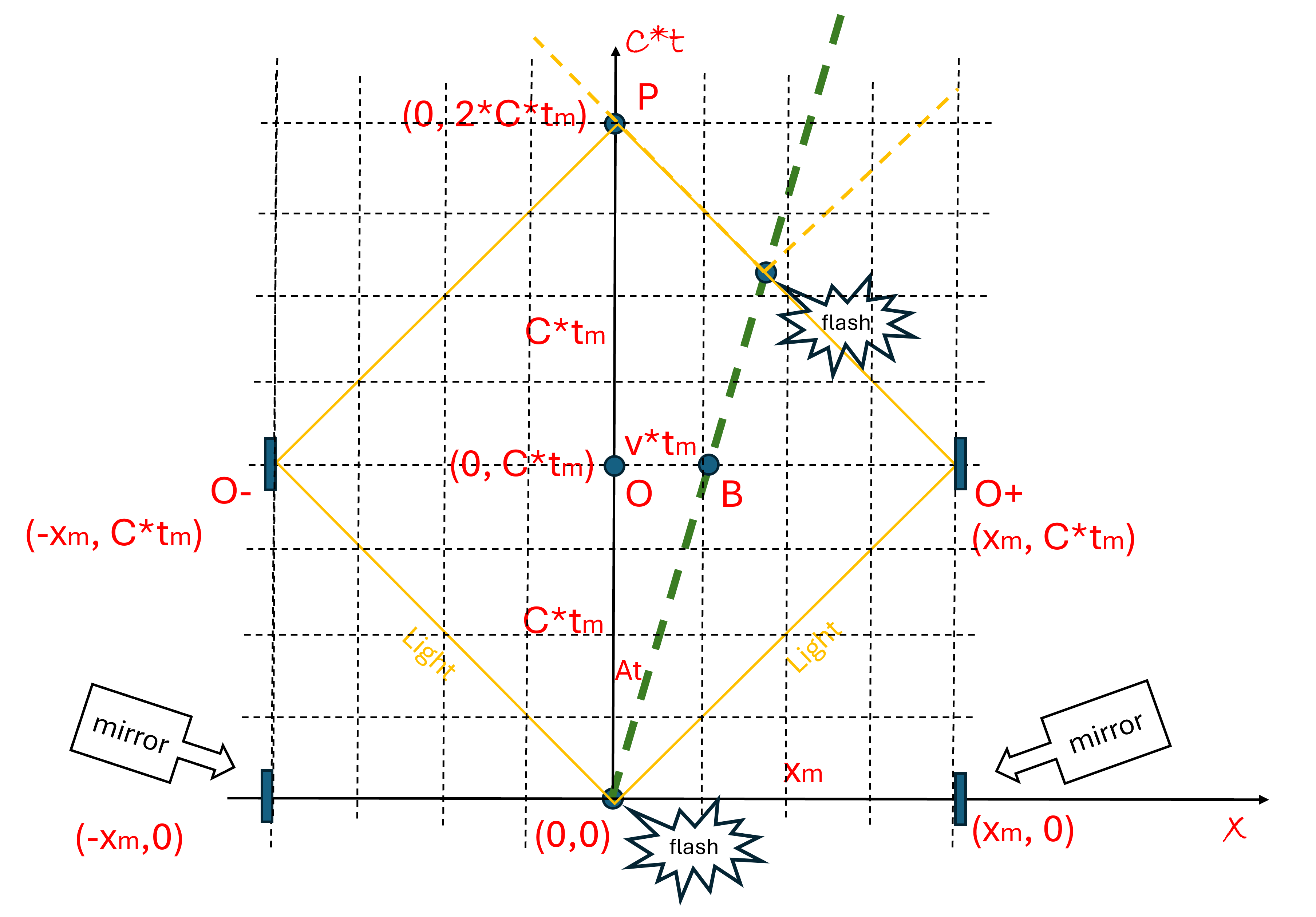
We can use the same concepts to find the meaning of Distance in Space-Time. Consider the example of a moving flash bulb (bulb frame) between two stationary mirrors (mirror frame) that we examined in the last post. For simplicity and clarity, we are only looking at the ‘x’ and ‘C*t’ dimensions and have put in grid lines parallel to the “x-axis” and “C*t-axis”. Here the x-axis points in the same direction that the bulb is moving.
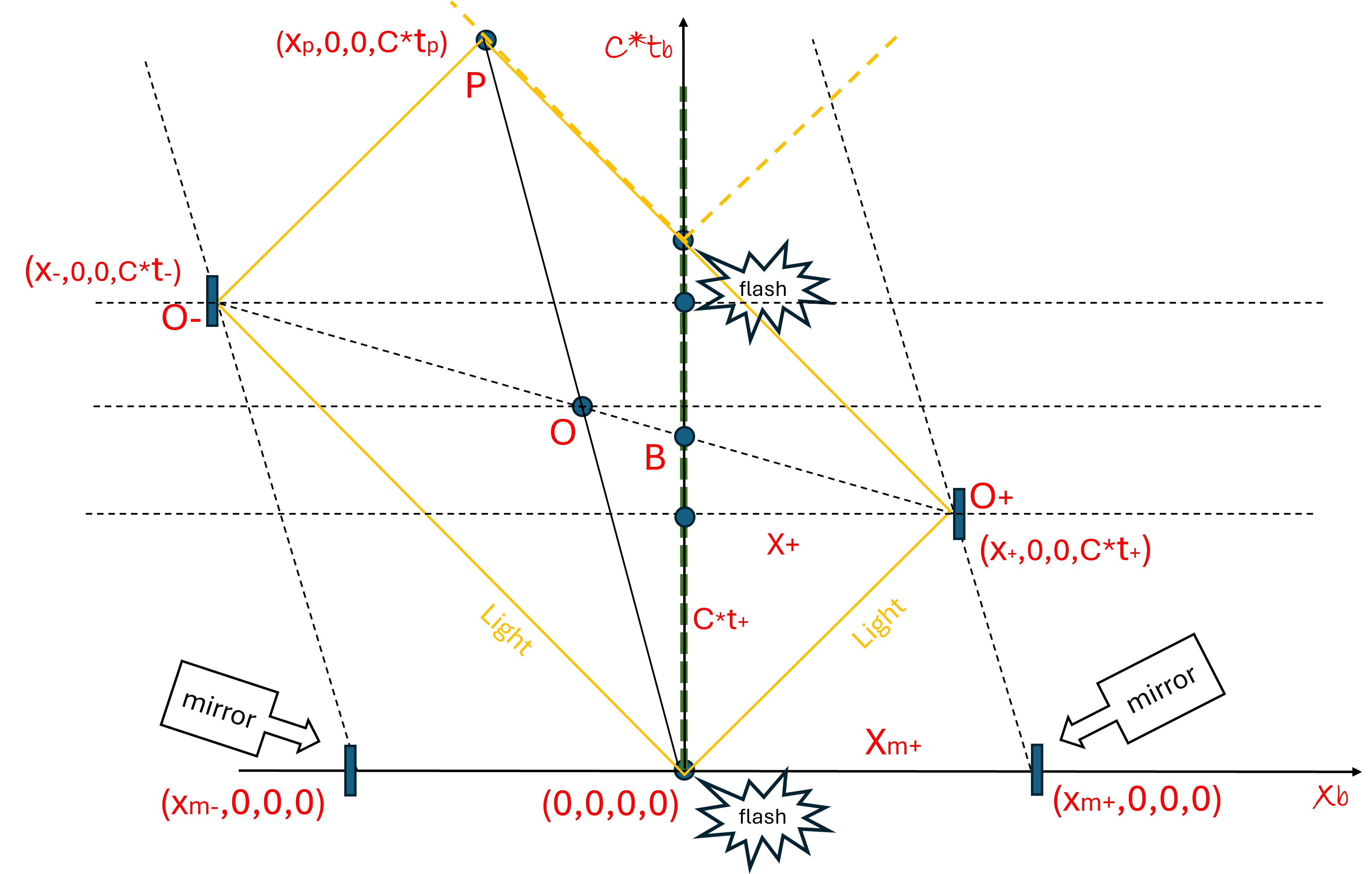
This does not restrict us because we always can rotate our frame of reference so that the ‘x’ direction is pointing in the same direction that the point is moving, we are ignoring the y = 0 and z = 0 coordinates. Now as before, let’s look at the same events in the perspective of the “bulb frame”, with the “xb-axis” and “C*tb-axis” defining this frame. In the following diagram we mark in the same “grid lines” parallel to the x-axis and C*t-axis, but now in the viewpoint of the “bulb” frame.
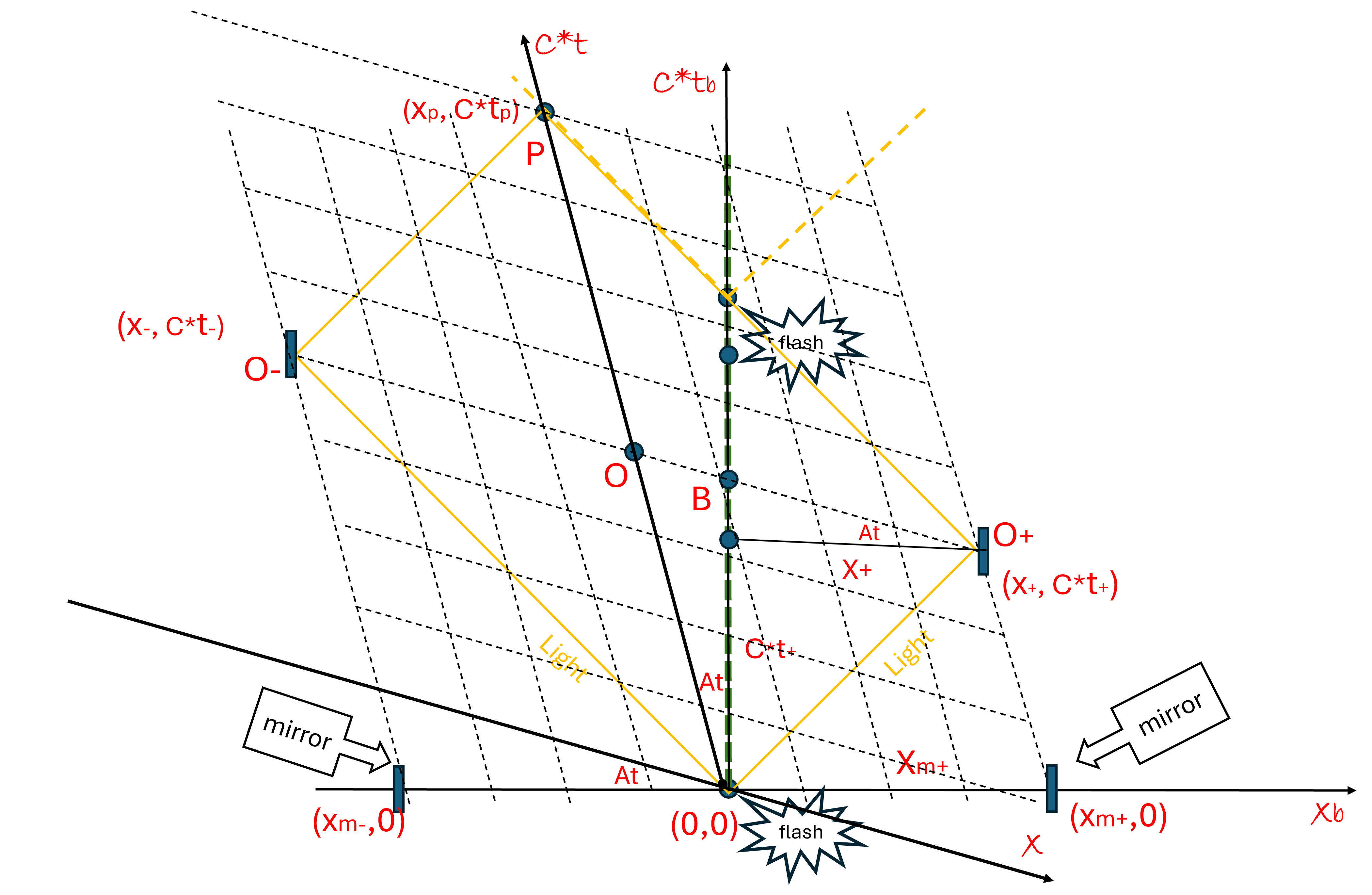
As we mentioned before, the grid lines in the mirror frame are not mutually perpendicular when seen in the bulb frame, they are stretched out “diamonds”. Note however that the “light lines” (yellow) in both frames of reference fall along the same points (they are 45 degree lines in both frames of reference). Another thing to note is that the angle (At) of the bulb from the C*t-axis to the C*tb-axis is the same as the angle (At) between the negative-x-axis and the negative-xb-axis, but unlike the spherical rotations, they are now rotating in opposite directions and squeezing closer together.
As the angle (At) is increased, the two “mirror” axes, as seen from the “bulb” frame of reference, would come closer together, squeezing the “mirror” reference grid together like one of those fold-out books, until they get to 45 degrees (the speed of light), where the mirror frame axii are completely squeezed together and the grid lines disappear completely. Stare at the diagram above and you might be able to imagine it. This might seem really weird at first, but it is a consequence of the speed of light being the same (at 45 degrees) in both frames.
What do you think the “bulb” frame of reference would look like in the “mirror” frame of reference? See the diagram below:
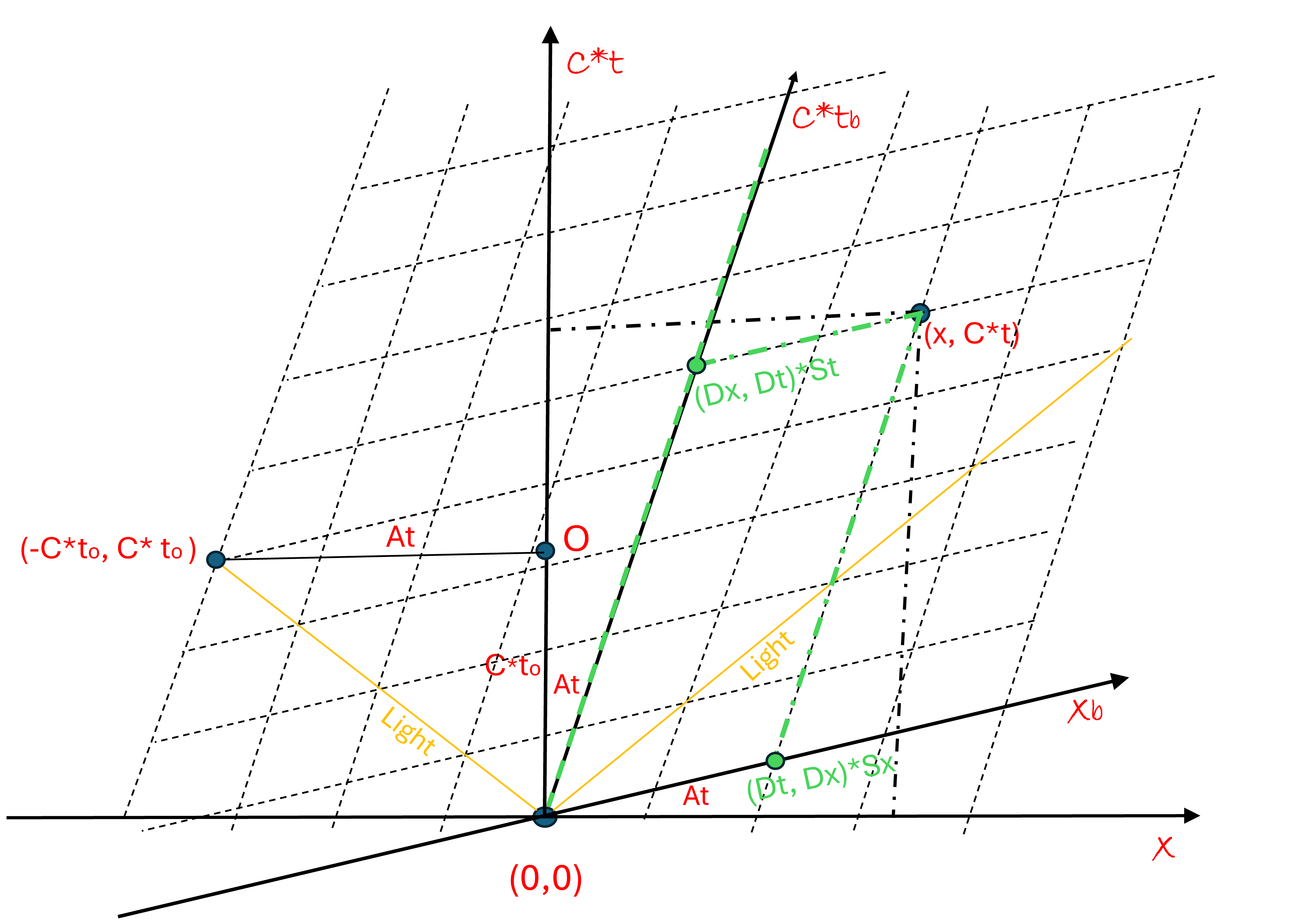
Let’s now see if the math works out. Let us look at a specific point (x, C*t) in the mirror frame and ask how it would look in the bulb frame. First let’s write the equation for the “C*tb” axis as seen in the mirror frame. Let’s say it is in the direction (Dx, Dt). Recall that this is the same direction as the “bulb” world line is in the above world diagram. Then any point (xtb, C*ttb) at a distance St along the C*tb-axis can be written:
(xtb, C*ttb) = (Dx, Dt)*St
Where (Dx, Dt) marks the direction of the bulb world line in the mirror frame, and St is a distance marked along the C*tb-axis, and is yet to be determined. We can also find the equation of a point along the xb-axis in the mirror frame.
(xxb, C*txb) = (Dt, Dx)*Sx
Note that (Dt, Dx) is the direction of the xb-axis which is at the same angle, At, above the x-axis (as required by the space-time geometry) and Sx is the (yet undetermined) distance marked along the xb-axis.
From our orienteering days, we have seen that we can arrive at the point (x, C*t) by “moving” along the C*tb-axis a distance St, and then turning right to “move” in the direction parallel to the xb-axis a distance Sx (as seen by the green lines in the diagram). Note that the Sx and St are the coordinates in the “bulb frame” of reference. And so:
(x, C*t) = (Dx, Dt)*St + (Dt, Dx)*Sx
We can now “dot” both sides with a direction that is perpendicular to the C*tb-axis (Dt, -Dx) to eliminate the St term and thus find Sx:
(Dt, -Dx).(x, C*t) = (Dt, -Dx).(Dx, Dt)*St + (Dt, -Dx).(Dt, Dx)*Sx
=(Dt*Dx + –Dx, Dt)*St + (Dt*Dt – Dx*Dx)*Sx
= 0*St + (Dt2 – Dx2)*Sx
= (Dt2 – Dx2)*Sx
and we can find the St coordinate by a similar process:
(-Dx, Dt).(x, C*t) = (-Dx, Dt).(Dx, Dt)*St + (-Dx, Dt).(Dt, Dx)*Sx
=(-Dx*Dx + Dt, Dt)*St + (-Dx*Dt + Dt*Dx)*Sx
= (Dt2 – Dx2)*St + 0*Sx
= (Dt2 – Dx2)*St
If we define the metric such that
Dt2 – Dx2 = 1,
(called a hyperbolic metric) then the “magic” matrix that transforms the event (x, C*t) into the (Sx, St) event coordinates in the “bulb frame” is found by combining the three equations above in a matrix equation, as usual:
[(Dt, -Dx), (-Dx, Dt)].(x, C*t) = (Sx, St)
And there we have it, the way to convert between the two frames of reference, this is also referred to as the “Lorentz Transform”.
We should say a few words about the meaning of the hyperbolic metric Dt2 – Dx2 = 1. If we draw a plot of this metric, we can see that Dx, and Dt are defined by coordinates of points on the unit hyperbola as shown:
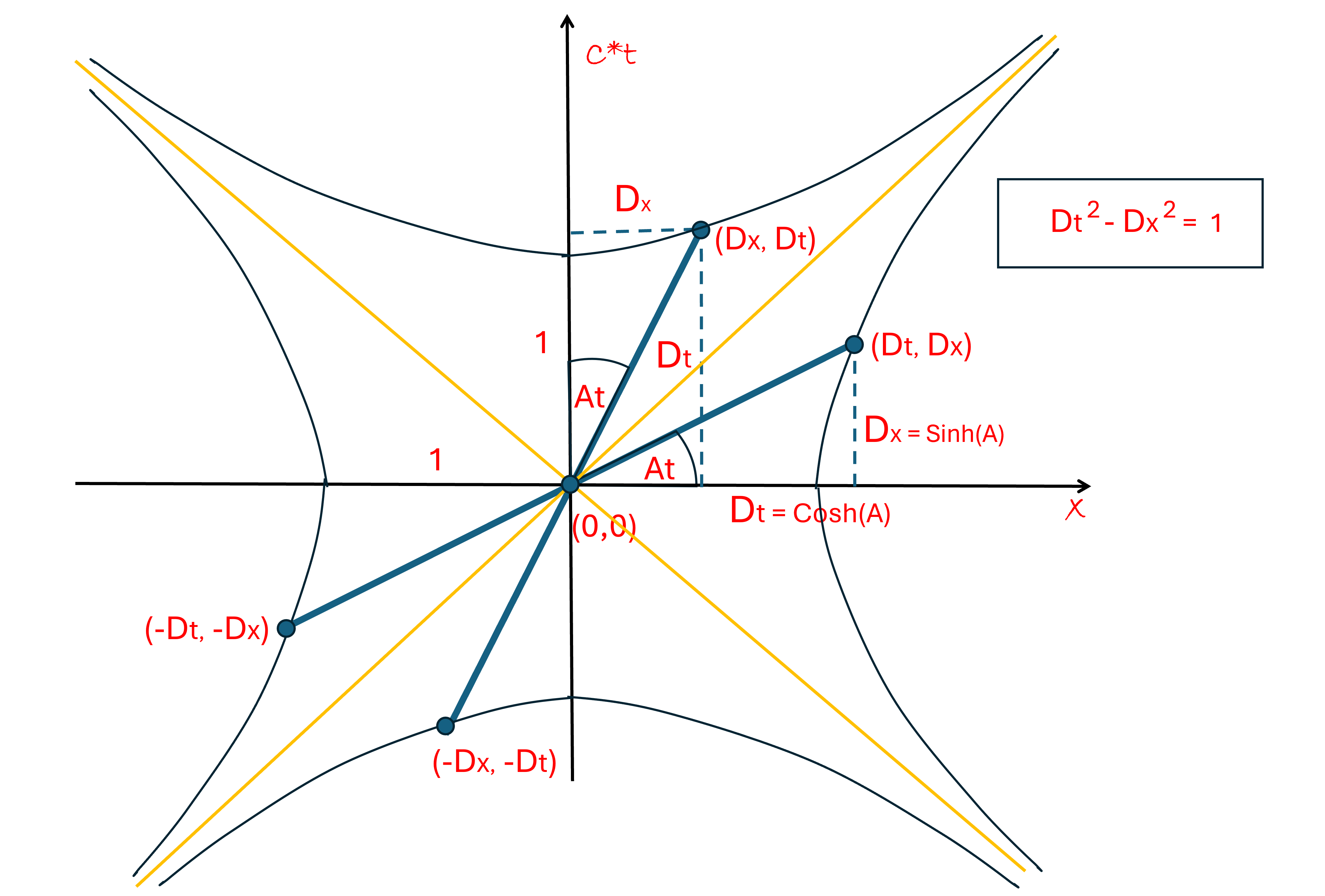
There are special functions, the hyperbolic sine (Sinh) and cosine (Cosh), that are defined to find (Dx, Dt) from the angle At:
(Dx, Dt) = (Sinh(At), Cosh(At))
We see that this is a new way of defining distances in Space-Time. If the point (x, C*t), is in the direction (Dsx, Dst):
(x, C*t) = (Dsx, Dst)*S (where S is the spacetime distance)
then 1 = Dst2 – Dsx2
S2 = S2*(Dst2 – Dsx2)
S2 = (S*Dst)2 – (S*Dsx)2
S2 = (C*t)2 – (x)2
And we have found a way to define distance in space-time.
Returning to our moving bulb example, we finish off by finding the direction (Dx, Dt) of the bulb, moving with a speed “v” in the“positive-x-direction” in space-time (which is also the direction of the “C*tb” axis in the mirror frame). After a time ‘tb’, the bulb has traveled a distance of xb = v*tb thus:
(v*tb, C*tb) = (Dx, Dt) * St
Where St is the space-time distance traveled by the bulb, which we now know to be:
St2 = (C*tb)2 – (v*tb)2
= (C2 – v2)*tb2
And so
St = Sqrt(C2 – v2)*tb
And thus we have found:
Dx = v/Sqrt(C2 – v2)
Dt = C/Sqrt(C2 – v2)
Finally we have come full circle and filled in the unknowns. Don’t worry if you are having trouble understanding it all. It still takes me a bit of time to completely wrap my mind around these concepts. Just for reference, in science literature, Dt is often called the Greek letter “gamma” and the ratio ‘v/c’ is often called “beta”, thus Dx = gamma*beta and Dt = gamma.
I believe that that is sufficient for now. You might have many questions, but if you read and study this post a few times, you will be able to get the gist of how Special Relativity works to transform between Space-Time reference frames.